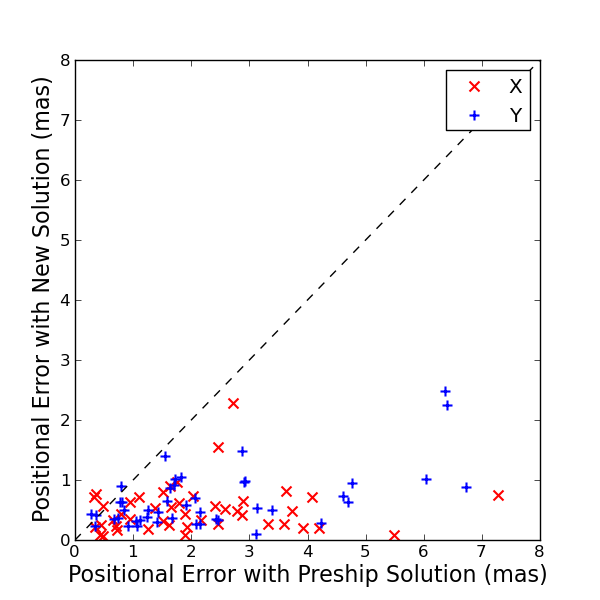
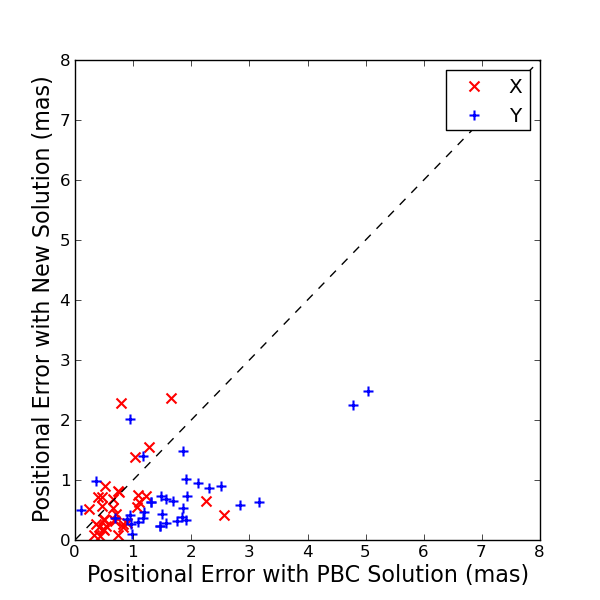
Figure 2: Positional errors of Galactic center stars using the new distortion solution versus the preship solution (left) and versus P. B. Cameron's solution (right). The new solution is a factor of ~3-4 improved in both X (red crosses) and Y (blue plus signs) over the pre-ship solution and in Y over the PBC solution.
How to Use this Solution with Drizzle:
Python code to undistort individual frames using the IRAF package drizzle: nirc2dewarp.py (Last updated: 2010 Nov. 20)We thank Shelley Wright for her help with this code.
Also see notes on this at: AstroBetter